参考Lecture3 Page32
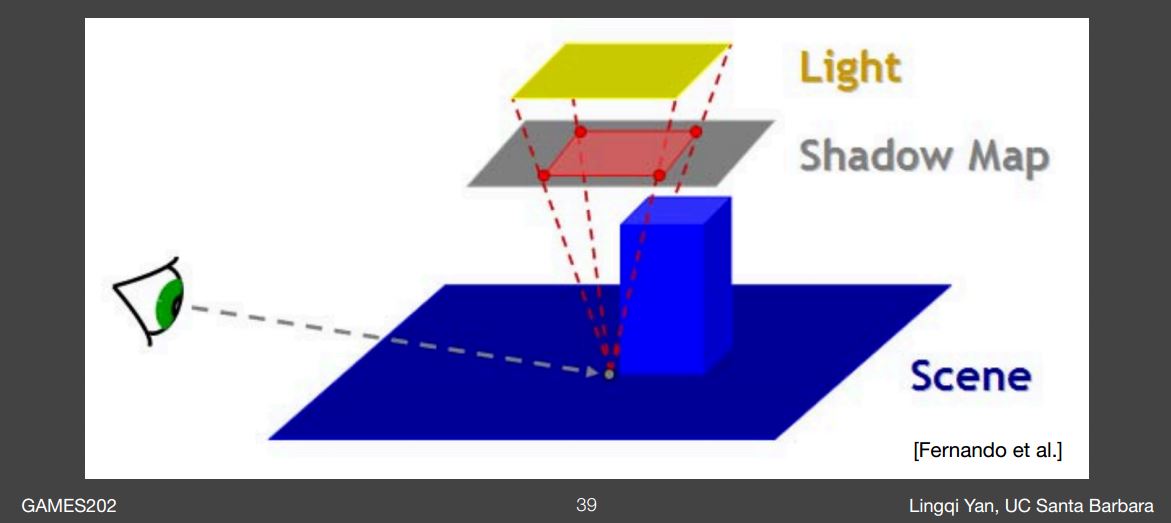
for point P on the floor,
(1) compare its depth with all pixels in the red box, e.g. 3×3
(2) get the compared results, e.g.
1, 0, 1,
1, 0, 1,
1, 1, 0,
(3) take avg. to get visibility, e.g. 0.667
Q1:如果从光源看向一个没有遮挡物体的地板,也类似这么做,取着色点P的深度,和Shadow Map中其附近纹素存储的深度值对比,P应该是小于近处地板的深度(不可见),大于远处的地板深度(可见),这样看即便没有任何遮挡visibility也<1。如果是PCSS的话可以理解,会在一定范围内搜索blocker并自适应filter大小,如果没有blocker就可以设置filter大小为该P点本身,就不会出现这样的情况。但是不太清楚PCF思想中怎么处理这样的情况,是类似自遮挡问题那样加上一定的误差吗?
Q2:为什么PCF选择在Shadow Map中取P点附近的纹素对比算平均,而不是取P点附近的其他着色点深度分别对比其对应纹素的深度得出其可见性再算平均呢?是从实现的难易程度考虑吗?
.